实验三:全源最短路¶
负责助教:唐适之 tsz19@mails.tsinghua.edu.cn
在本实验中,你将通过实现 GPU 加速的全源最短路(Floyd-Warshall 算法)熟悉 CUDA 编程,以及一种常见的优化方法:分块(Blocking)。在保证正确性的前提下,我们鼓励探索利用 GPU 的各种硬件特性以优化程序性能。
实验任务¶
你需要实现一个在 GPU 上运行的 Floyd-Warshall 算法。相信你在之前的课程中对 Floyd-Warshall 算法已经有所理解。如果你对图或全源最短路仍不太了解,可以通过书籍、博客与其他课程等多种途径进行学习。作为提醒,以下是 Floyd-Warshall 算法的伪代码:
// 设图 G = (V, E) 为赋权有向图
// 输入图的大小 |V| = n
// 输入邻接矩阵 D[n][n],D[x][y] 表示点 x 到点 y 的距离
for (int k = 0; k < n; k++)
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
为简化问题,本实验中对输入作如下约定:
- 输入图 G = (V, E) 的规模 |V| <= 10000;
- E 中的所有边权为整数,且不大于 100000;
- G 为完全图,即邻接矩阵中不存在值为无穷大的项;
- G 中,每个点到自己的距离保证为 0。
你需要修改 apsp.cu 文件以实现自己的算法。具体而言,你需要实现该文件中的 void apsp(int n, int *graph) 函数,其具体定义可以在 apsp.h 中找到。请注意 graph 指针指向 GPU 内存地址。除调试外,一般你不需要在主存和 GPU 内存之间进行拷贝。请在 graph 指针指向的邻接矩阵中 原地更新结果,不需要将结果写入其他数组。
apsp.cu 中已经包含了 Floyd-Warshall 算法的最简单的 GPU 实现,可作为参考,但仍有十几倍的优化空间。请不要修改除 apsp.cu 外的任何文件。
请注意:朴素的 GPU 实现难以发挥 GPU 的硬件优势(往往劣于 CPU 上的朴素 OpenMP 实现),针对 GPU 进行程序优化往往是必须的。因此,你必须对 GPU 实现进行优化(直接提交未经修改的 apsp.cu 将不会获得加速比得分)。下一节,我们提供了参考的优化方法。
参考优化方法¶
以下介绍一种基于分块思想的 Floyd-Warshall 算法优化方法,这种方法可以提升数据的局部性,以充分利用 GPU 的共享内存和寄存器资源。这种方法是本实验的推荐实现方法。如果你有更好的思路,也鼓励尝试其他优化策略。
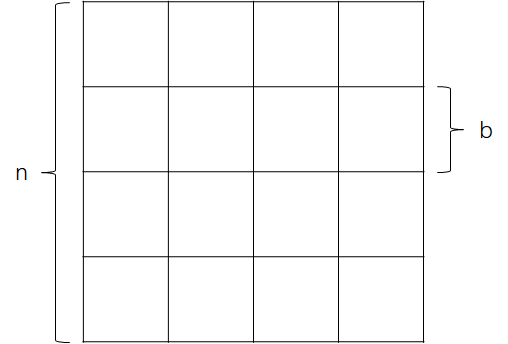
设图 G=(V,E) 的规模 n = |V|,邻接矩阵为矩阵 D \in \mathbf{R}^{n \times n},首先将 D 分为大小为 b \times b 的块(即子矩阵)。如下图,D 被分为了16 块。
算法分为 \lceil\frac{n}{b}\rceil 步,每步分为三阶段。第 p 步(0 \le p < \lceil\frac{n}{b}\rceil)对应于原算法中 pb \le k < (p+1)b 的迭代 。算法如下:
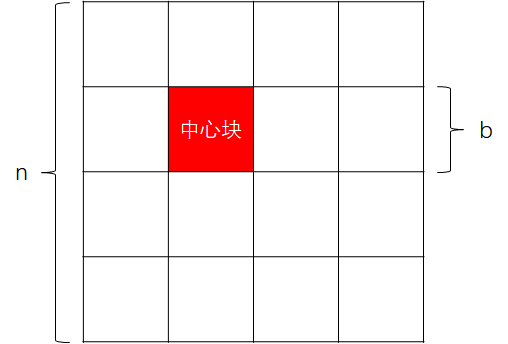
阶段一¶
选出对角线上的第 p 个块,记为“中心块”。在中心块内部执行 Floyd-Warshall 算法。以 p=1 为例,如下图:
伪代码如下:
for (int k = p * b; k < (p + 1) * b; k++)
for (int i = p * b; i < (p + 1) * b; i++)
for (int j = p * b; j < (p + 1) * b; j++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
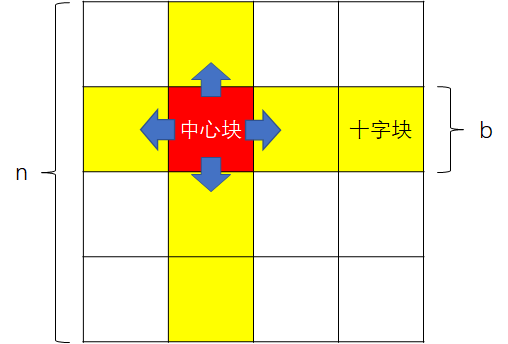
阶段二¶
选出中心块上下左右方向的 2(\lceil\frac{n}{b}\rceil - 1) 个块,记作“十字块”。用中心块的结果和十字块中原本的其他结果更新十字块。以 p=1 为例,如下图:
伪代码如下:
for (int k = p * b; k < (p + 1) * b; k++) {
for (int i = p * b; i < (p + 1) * b; i++) {
for (int j = 0; j < p * b; j++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
for (int j = (p + 1) * b; j < n; j++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
}
for (int j = p * b; j < (p + 1) * b; j++) {
for (int i = 0; i < p * b; i++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
for (int i = (p + 1) * b; i < n; i++)
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
}
}
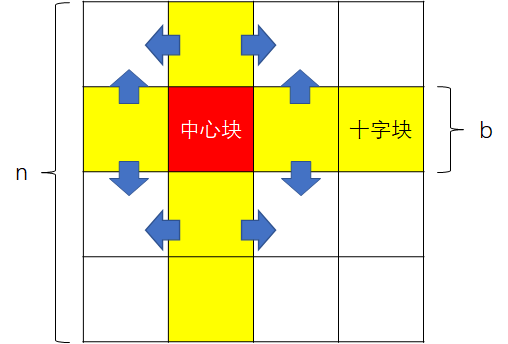
阶段三¶
用“十字块”的结果更新剩余的块。以 p=1 为例,如下图:
伪代码如下:
for (int k = p * b; k < (p + 1) * b; k++)
for (int i, j ∈ [0, p * b) ∪ [(p + 1) * b, n))
D[i][j] = min(D[i][j], D[i][k] + D[k][j]);
对于每个 p,依次执行上述三个阶段,即等价于原本的 Floyd-Warshall 算法。
利用这种分块的方式,你可以将部分数据放入大小有限的共享内存或寄存器中,以提升程序执行效率。
编程提示和优化技巧¶
- 使用分块算法时,矩阵底部和右侧的块可能是不完整的,在程序中可能需要边界判断;
- 使用指针时,请注意数据在 GPU 上还是主存上:本实验的输入输出均在 GPU 上,调试时你可能需要将其手动拷贝到主存上;
- 记得在适当位置添加
__syncthreads()(潜在优化点:最短路算法的某一步中,就算访问旧的 shared memory 值,也可证明答案是正确的,此时可以不做同步;如实现此项优化,鼓励在报告中提供证明); - 注意检查 kernel 和 CUDA API(例如
cudaMemcpy)调用中的错误(kernel 参数不合法、访存越界等错误时常体现为答案错误而非运行错误,此时需要注意排查):- 注意检查错误返回值(可使用
cuda_utils.h中的CHK_CUDA_ERR宏); - 可使用
compute-sanitizer(旧称cuda-memcheck)调试工具自动检查错误;
- 注意检查错误返回值(可使用
- 不需要 global memory 上的同步时,尽量将循环置于 kernel 内,以减少不必要的 kernel 启动次数;
- 调整
threadIdx.x和threadIdx.y的顺序,或者调整数组的行优先/列优先方向,更好地适应全局内存的缓存行(cache line),以及避免(对性能的影响极其严重的)共享内存的 bank conflict 现象。 - 使用常量的线程块大小和共享内存大小,有助于编译器进行自动优化;
- 依据硬件资源进行调优:
- 调整分块大小和线程分配方案,尽可能用满 GPU 资源,包括线程数、共享内存大小、寄存器数量等,以提升性能;
- 可在P100 GPU 官方文档或NVIDIA提供的简易计算器查阅实验所用的 GPU 资源数量详情;
- 可以使用
nvprof工具分析性能瓶颈:直接运行可获取各 kernel 的运行时间,详细性能指标可参阅nvprof支持的 event 和 metrics 列表,并在运行nvprof时指定该 event 或 metrics(访存数、缓存利用率等信息在 metrics 里,bacnk conflict 信息在 event 里); - 编译时可以使用
nvcc --ptxas-options=-v命令打印 GPU 资源使用情况;由于在 CUDA 编程时没有办法规定一个变量一定要使用寄存器,而局部变量(含局部数组)既可能被编译为寄存器,也可能被编译为 local memory(即栈上内存);这条命令有助于确认你的程序使用的到底是寄存器还是 local memory;如果你想使用寄存器却发现编译器使用了 local memory,请尝试 1)减少局部变量数目 2) 减少访问局部变量时的相对访存; - 注:课程集群提供的 P100 GPU 最大支持每个 SM 64KB shared memory,但每个 thread block 最多只支持 48KB,请勿混淆(文档)。
实验步骤¶
首先将实验文件 拷贝到自己的目录,并进入 PA3 目录:
cp -R /home/course/hpc/assignments/2023/PA3 ~/
cd ~/PA3/
修改 apsp.cu 文件以实现自己的算法。
编译运行流程¶
- 加载 CUDA 环境:
spack load cuda; - 编译:
make; - 运行
srun -p gpu -N 1 ./benchmark <图规模>以运行你的程序。其中<图规模>为一个整数,表示图中的点数。程序会打印结果是否正确及运行时间两项数据。
分数细则¶
正确性¶
正确性得分共占 60\%,包含两部分:基础分(占 10 \%)和加速比得分(占 50 \%)。
对于基础分,如果 benchmark 程序输出了 Validation Passed,就可以获得该测试用例的基础分。有多组测试用例。你将获得通过的测试用例的分数,每个测试用例分数相同。
对于加速比得分,助教会使用图规模 n = 10000(最大规模)运行你的程序,如果相对于助教提供的朴素实现(apsp_ref)的加速比 超过 2 ,则加速比合格,否则加速比不合格。对于每个测试用例,只有当你 获得了正确性基础分且加速比合格,方可获得该测试用例的加速比得分。注意,助教仅使用 n = 10000 时的加速比来决定你的加速比是否合格,而不会对所有测试用例分别测试加速比。
参考依据
根据往年的评测结果,只要正确实现了上述的分块算法,将每个矩阵分块置于共享内存中,每个矩阵分块由一个线程块计算,即可达到 10 左右的加速比,远超加速比得分要求。
性能¶
性能得分共占 30\%,共有若干组 n 不同的测试用例。
- 对于每组测试用例,只有当你获得了正确性基础分和加速比得分后,才能得到性能分。每组测试用例的性能分数相同。
- 性能测试只针对
void apsp(int n, int *graph)函数。 - 根据你的性能在全体同学中的排名给出每组测试用例的分数:每组测试用例各自排名,性能排名前 10 \% 的同学得到 100 \% 的分数,排名 10 \% - 20 \% 的同学得到 90 \% 的分数,依此类推。对于任何测试用例,获得正确性分数的同学将至少获得 10 \% 的性能分数。
得分建议
为了获得更高性能,最有效果的优化是实现两级分块。即每个大块置于共享内存中,各由一个线程块计算;每个小块至于寄存器中,各由一个线程计算。若实现了这种两级分块算法,并确保各线程每次可以访问连续若干个元素(以利用向量访存),就可以获得大幅性能提升。根据往年的评测结果,在 P100 (评测结点的 GPU)上,n = 10000(最大规模)时,性能最高的提交的加速比可达 35 左右,其主要优化来源于两级分块。
实验报告¶
实验报告共占 10\%,助教根据实验报告给出分数,需要写的内容在“实验提交”一节中给出。
注意事项¶
- 禁止任何欺骗评测程序的手段,包括但不限于直接输出
Validation Passed、干扰校验程序运行、提前保存结果以在测试时直接输出等。一经发现,将取消本次实验得分。 - 你修改的文件应该仅限于
apsp.cu。即使修改了其他文件(如用于调试等目的),也要确保在 不进行这些修改 的情况下,程序能够正确编译运行。助教将替换所有其他文件为下发的版本后进行评测,以确保评分的正确性和公平性。 - 集群的登陆结点与计算结点配备了不同的 GPU,最终得分以计算结点为准(NVIDIA Tesla P100),程序在登陆结点的性能或正确性不作为评分依据。
实验提交¶
- 实验代码:
- 在截止日期之前将完成后的整个实验框架置于自己 home 目录下的
PA3目录,如/home/course/hpc/users/2020000000/PA3。
- 在截止日期之前将完成后的整个实验框架置于自己 home 目录下的
- 实验报告:
- 将 PDF 文件 提交至网络学堂。
- 包含以下内容:
- 介绍你的实现方法,包括有哪些 GPU kernel、每个 kernel 中线程和线程块如何分配、如何利用各级存储等(不要直接粘贴代码);
- 在 n = 1000, 2500, 5000, 7500, 10000 时的运行时间,及相对于助教提供的朴素实现的加速比。